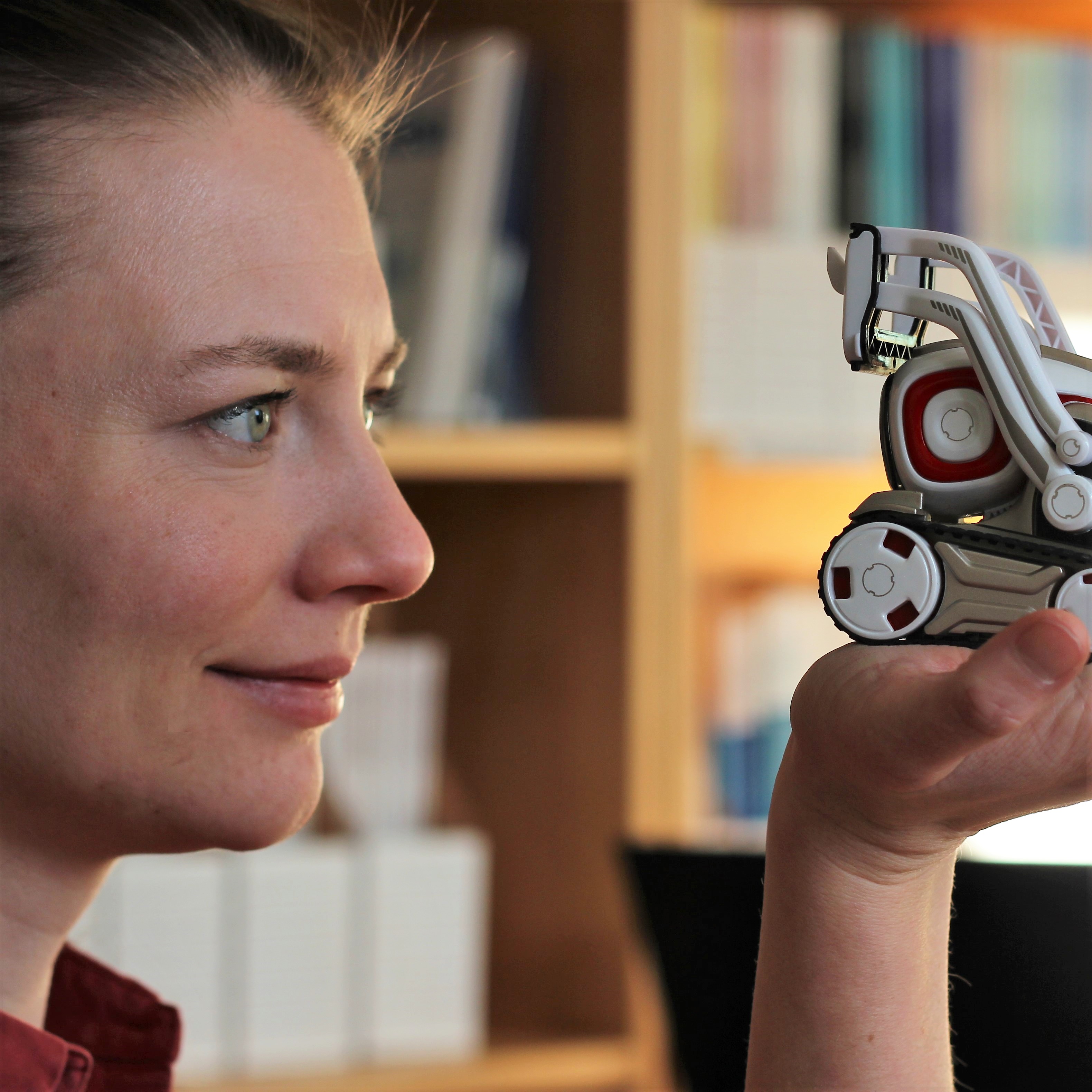
I am currently a Postdoctoral Researcher at the division of Robotics, Perception and Learning at KTH Royal Institute of Technology in Stockholm, Sweden, where I also received my Ph.D. My research explores methods and algorithms that can enable autonomous social robots to support people.
In my Ph.D. thesis titled Computational approaches to interaction-shaping robotics, I explored how robots can shape human-human interactions while acting fully autonomously and investigated autonomy either through heuristics or learning approaches.
Previously, I have been working in the Corporate Research at KUKA where I focused on mobile robot navigation. I received my B.Sc. and M.Sc. with a Major in Computer Science and a Minor in Robotics at TU Dortmund in Dortmund, Germany.
In my Ph.D. thesis titled Computational approaches to interaction-shaping robotics, I explored how robots can shape human-human interactions while acting fully autonomously and investigated autonomy either through heuristics or learning approaches.
Previously, I have been working in the Corporate Research at KUKA where I focused on mobile robot navigation. I received my B.Sc. and M.Sc. with a Major in Computer Science and a Minor in Robotics at TU Dortmund in Dortmund, Germany.
Thesis defended!
September 05, 2024I defended my thesis titled Computational approaches to interaction-shaping robotics.
A computational lense to interaction-shaping robotics
May 02, 2024My research statement was accepted at the highly competitive RSS Pioneers Workshop '24.
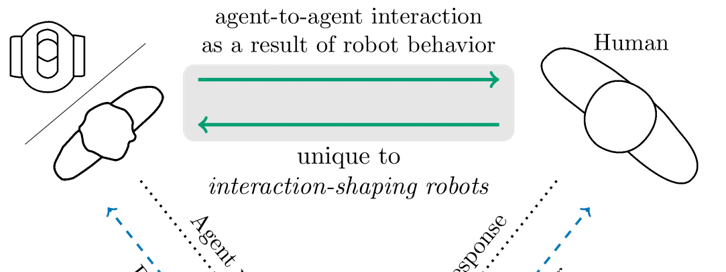
Interaction-shaping Robotics: Robots That Influence Interactions between Other Agents
February 12, 2024Our paper discussing coining the term Interaction-Shaping Robotics as a subfiled of HRI that studies how robots influence the interactions...