Assisting Human-Human Interactions
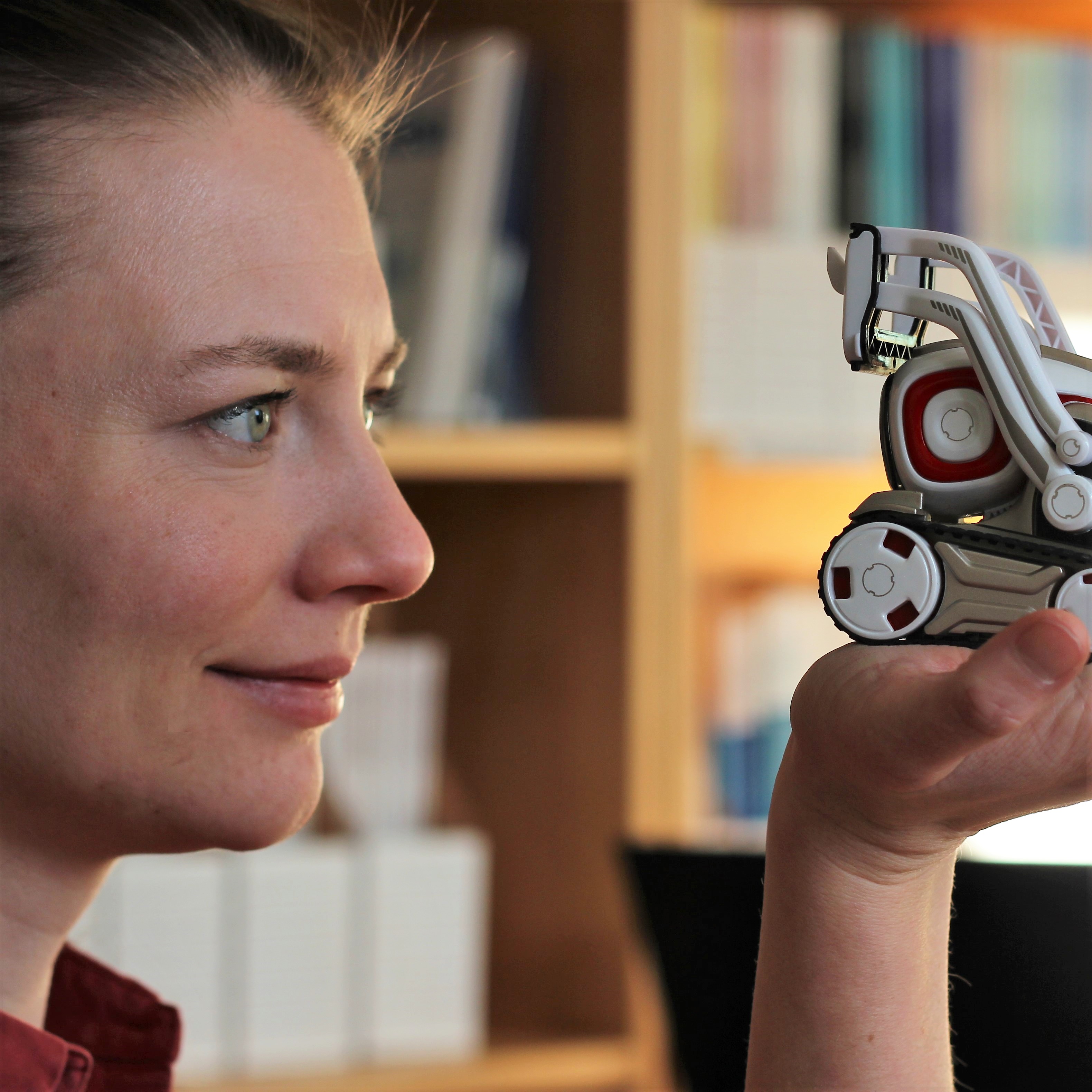
My research is driven by the desire to develop robots that can assist our social interactions. On a smaller scale, the goal is to improved social interactions among humans in groups, and improve social wellbeing. On a larger scale, I imagine robots to assist processes such as cohesion, e.g. in classrooms, which eventually could lead to more generalized trust and thereby impact society as a whole.
Perceiving Group Dynamics
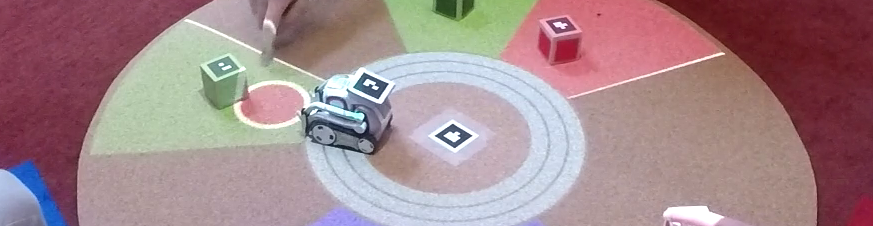
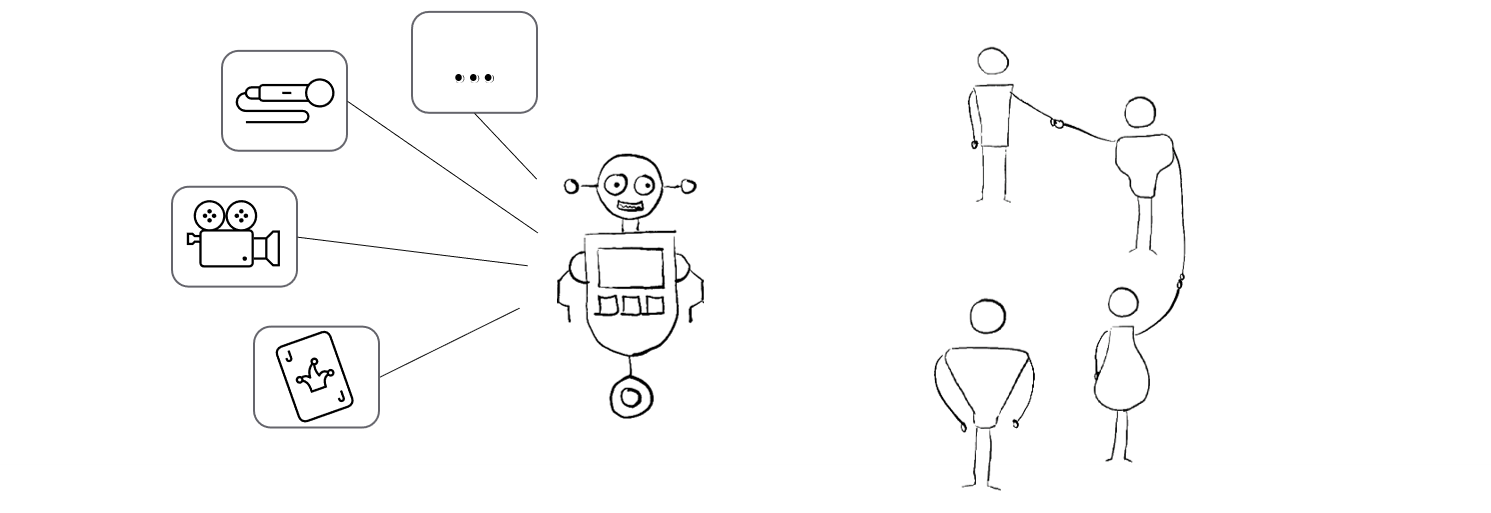
As each group that a robot encounter might be different and have different needs, it is necessary to perceive the current group dynamics and choose an action for assistance that would be targeted to this specific group and the dynamics in the specific moment. Therefore, I am interested in how robots could perceive group dynamics and act accordingly.
Non-verbal behaviors
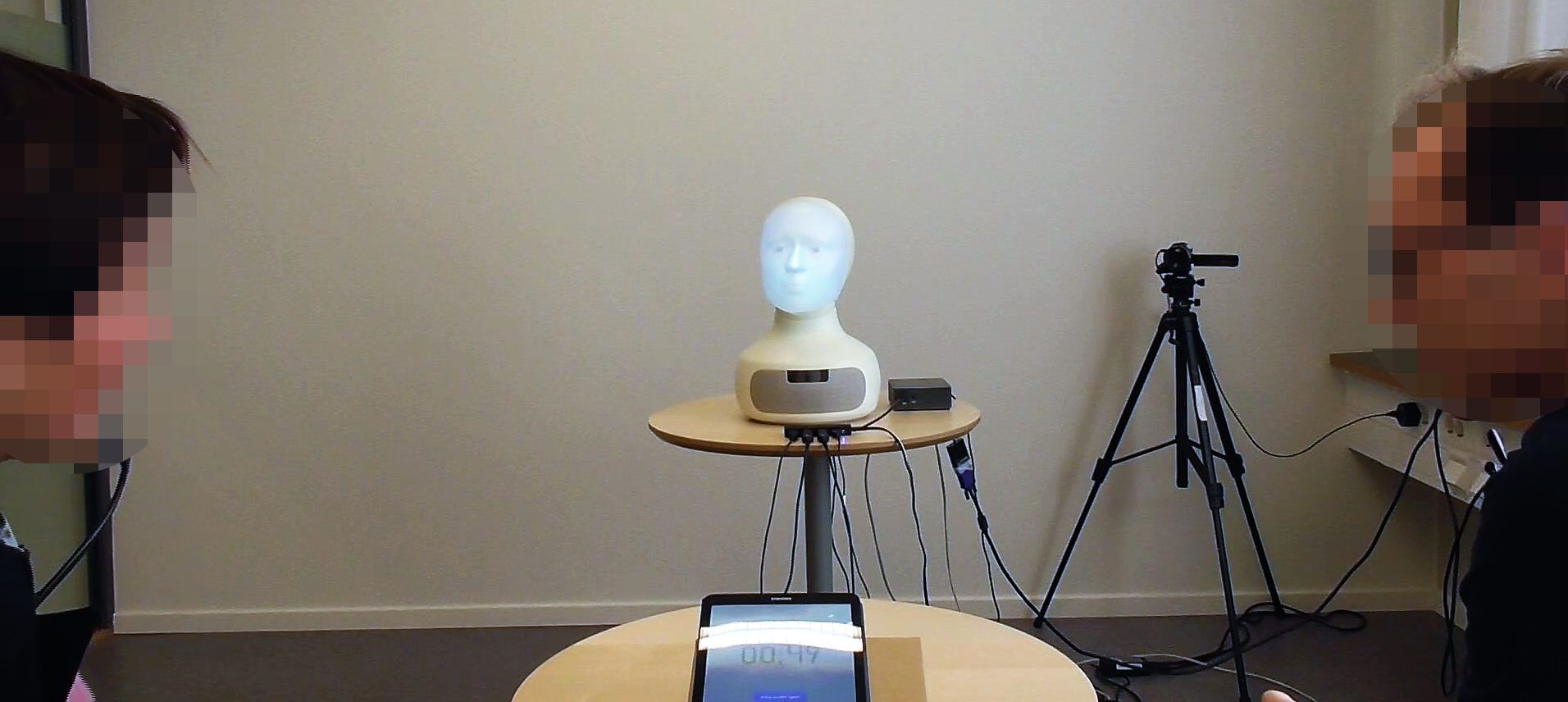
65% of human communication is non-verbal. Further, research in the HRI community has shown that humans react to non-verbal cues given by robots similar as to the same cues given by humans. Therefore, I am exploring how non-verbal behaviors could be utilized to build robot behavior that shapes group dynamics.